Class to represent a Pose in Dual Quaternion space. More...
#include <DualQuaternionPose.hpp>
Public Member Functions | |
| DualQuaternionPose (const std::string &name, const std::string &reference="world") | |
| Constructor with name and reference frame provided. More... | |
| DualQuaternionPose (const DualQuaternionPose &state) | |
| Copy constructor of a DualQuaternionPose. More... | |
| DualQuaternionPose (const DualQuaternionState &state) | |
| Copy constructor of a DualQuaternionPose from a DualQuaternionState. More... | |
| DualQuaternionPose (const std::string &name, const Eigen::Vector3d &position, const Eigen::Quaterniond &rotation, const std::string &reference="world") | |
| Construct a DualQuaternionPose from a position given as a vector of coordinates and a quaternion. More... | |
| const Eigen::Vector3d | get_position () const |
| Getter of the position attribute. More... | |
| const Eigen::Quaterniond & | get_orientation () const |
| Getter of the orientation from the primary. More... | |
| void | set_orientation (const Eigen::Quaterniond &orientation) |
| Setter of the orientation. More... | |
| void | set_position (const Eigen::Vector3d &position) |
| Setter of the psotion from a vector. More... | |
| void | set_position (const Eigen::Quaterniond &dual) |
| Setter of the position from a dual. More... | |
| const DualQuaternionPose | conjugate () const |
| compute the conjugate of the current DualQuaternionPose More... | |
| const DualQuaternionPose | inverse () const |
| compute the inverse of the current DualQuaternionPose More... | |
| DualQuaternionPose & | operator*= (const DualQuaternionPose &q) |
| Overload the *= operator. More... | |
| const DualQuaternionPose | operator* (const DualQuaternionPose &p) const |
| Overload the * operator. More... | |
| DualQuaternionPose & | operator*= (const DualQuaternionState &s) |
| Overload the *= operator. More... | |
| const DualQuaternionPose | operator* (const DualQuaternionState &s) const |
| Overload the * operator. More... | |
| void | operator= (const DualQuaternionState &s) |
| Overload the = operator with a DualQuaternionState. More... | |
| void | initialize () |
| Initialize the DualQuaternionPose to a zero value. More... | |
| const DualQuaternionPose | copy () const |
| Return a copy of the DualQuaternionPose. More... | |
 Public Member Functions inherited from state_representation::DualQuaternionState Public Member Functions inherited from state_representation::DualQuaternionState | |
| DualQuaternionState () | |
| Empty constructor. More... | |
| DualQuaternionState (const std::string &name, const std::string &reference="world") | |
| Constructor with name and reference frame provided. More... | |
| DualQuaternionState (const DualQuaternionState &state) | |
| Copy constructor. More... | |
| DualQuaternionState (const std::string &name, const Eigen::Quaterniond &primary, const Eigen::Quaterniond &dual, const std::string &reference="world") | |
| Construct a DualQuaternion from two quaternions. More... | |
| const Eigen::Quaterniond & | get_primary () const |
| Getter of the primary attribute. More... | |
| const Eigen::Quaterniond & | get_dual () const |
| Getter of the dual attribute. More... | |
| void | set_primary (const Eigen::Quaterniond &primary) |
| Setter of the primary attribute. More... | |
| void | set_dual (const Eigen::Quaterniond &dual) |
| Setter of the dual attribute. More... | |
| DualQuaternionState & | operator*= (const DualQuaternionState &q) |
| Overload the *= operator. More... | |
| const DualQuaternionState | operator* (const DualQuaternionState &p) const |
| Overload the * operator. More... | |
| const DualQuaternionState | conjugate () const |
| compute the conjugate of the current DualQuaternion More... | |
| virtual void | initialize () |
| Initialize the DualQuaternionState to a zero value. More... | |
| const DualQuaternionState | copy () const |
| Return a copy of the DualQuaternionState. More... | |
| Public Member Functions inherited from state_representation::SpatialState | |
| SpatialState () | |
| Empty constructor. More... | |
| SpatialState (const StateType &type) | |
| Empty constructor with a specific state type. More... | |
| SpatialState (const StateType &type, const std::string &name, const std::string &reference_frame="world", const bool &empty=true) | |
| Constructor with name and reference frame specification. More... | |
| SpatialState (const SpatialState &state)=default | |
| Copy constructor from another SpatialState. | |
| SpatialState & | operator= (const SpatialState &state) |
| Copy assignment operator that have to be defined to the custom assignment operator. More... | |
| const std::string & | get_reference_frame () const |
| Getter of the reference frame as const reference. More... | |
| virtual void | set_reference_frame (const std::string &reference_frame) |
| Setter of the reference frame. More... | |
| virtual bool | is_compatible (const State &state) const override |
| Check if the state is compatible for operations with the state given as argument. More... | |
| Public Member Functions inherited from state_representation::State | |
| State () | |
| Empty constructor. More... | |
| State (const StateType &type) | |
| Constructor only specifying the type of the state from the StateType enumeration. More... | |
| State (const StateType &type, const std::string &name, const bool &empty=true) | |
| Constructor with name specification. More... | |
| State (const State &state) | |
| Copy constructor from another State. More... | |
| virtual | ~State ()=default |
| Virtual destructor. | |
| State & | operator= (const State &state) |
| Copy assignment operator that have to be defined to the custom assignment operator. More... | |
| const StateType & | get_type () const |
| Getter of the type attribute. More... | |
| bool | is_empty () const |
| Getter of the empty attribute. More... | |
| void | set_empty (bool empty=true) |
| Setter of the empty attribute. More... | |
| void | set_filled () |
| Setter of the empty attribute to false and also reset the timestamp. More... | |
| const std::chrono::time_point< std::chrono::steady_clock > & | get_timestamp () const |
| Getter of the timestamp attribute. More... | |
| void | set_timestamp (const std::chrono::time_point< std::chrono::steady_clock > &timepoint) |
| Setter of the timestamp attribute. More... | |
| void | reset_timestamp () |
| Reset the timestamp attribute to now. More... | |
| const std::string & | get_name () const |
| Getter of the name as const reference. More... | |
| virtual void | set_name (const std::string &name) |
| Setter of the name. More... | |
| template<typename DurationT > | |
| bool | is_deprecated (const std::chrono::duration< int64_t, DurationT > &time_delay) |
| Check if the state is deprecated given a certain time delay. More... | |
| virtual bool | is_compatible (const State &state) const |
| Check if the state is compatible for operations with the state given as argument. More... | |
| virtual void | initialize () |
| Initialize the State to a zero value. More... | |
| virtual void | set_data (const Eigen::VectorXd &data) |
| Set the data of the state from a single Eigen vector. More... | |
| virtual void | set_data (const std::vector< double > &data) |
| Set the data of the state from a single std vector. More... | |
| virtual void | set_data (const Eigen::MatrixXd &data) |
| Set the data of the state from an Eigen matrix. More... | |
| operator bool () const noexcept | |
| Boolean operator for the truthiness of a state. More... | |
Friends | |
| const DualQuaternionState | log (const DualQuaternionPose &state) |
| Calculate the log of a dual quaternion. More... | |
| std::ostream & | operator<< (std::ostream &os, const DualQuaternionPose &state) |
| Overload the ostream operator for printing. More... | |
Additional Inherited Members | |
| Protected Member Functions inherited from state_representation::State | |
| void | set_type (const StateType &type) |
| Override the state type. More... | |
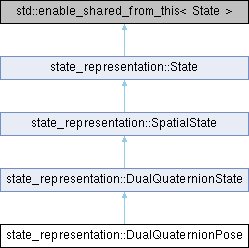
Detailed Description
Class to represent a Pose in Dual Quaternion space.
Definition at line 10 of file DualQuaternionPose.hpp.
Constructor & Destructor Documentation
◆ DualQuaternionPose() [1/4]
|
explicit |
Constructor with name and reference frame provided.
name the name of the state
reference the name of the reference frame
Definition at line 4 of file DualQuaternionPose.cpp.
◆ DualQuaternionPose() [2/4]
| state_representation::DualQuaternionPose::DualQuaternionPose | ( | const DualQuaternionPose & | state | ) |
Copy constructor of a DualQuaternionPose.
Definition at line 9 of file DualQuaternionPose.cpp.
◆ DualQuaternionPose() [3/4]
| state_representation::DualQuaternionPose::DualQuaternionPose | ( | const DualQuaternionState & | state | ) |
Copy constructor of a DualQuaternionPose from a DualQuaternionState.
Definition at line 12 of file DualQuaternionPose.cpp.
◆ DualQuaternionPose() [4/4]
|
explicit |
Construct a DualQuaternionPose from a position given as a vector of coordinates and a quaternion.
Definition at line 17 of file DualQuaternionPose.cpp.
Member Function Documentation
◆ conjugate()
| const DualQuaternionPose state_representation::DualQuaternionPose::conjugate | ( | ) | const |
compute the conjugate of the current DualQuaternionPose
- Returns
- the conjugate
Definition at line 27 of file DualQuaternionPose.cpp.
◆ copy()
| const DualQuaternionPose state_representation::DualQuaternionPose::copy | ( | ) | const |
Return a copy of the DualQuaternionPose.
- Returns
- the copy
Definition at line 89 of file DualQuaternionPose.cpp.
◆ get_orientation()
|
inline |
Getter of the orientation from the primary.
Definition at line 142 of file DualQuaternionPose.hpp.
◆ get_position()
|
inline |
Getter of the position attribute.
Definition at line 138 of file DualQuaternionPose.hpp.
◆ initialize()
|
virtual |
Initialize the DualQuaternionPose to a zero value.
Reimplemented from state_representation::DualQuaternionState.
Definition at line 84 of file DualQuaternionPose.cpp.
◆ inverse()
| const DualQuaternionPose state_representation::DualQuaternionPose::inverse | ( | ) | const |
compute the inverse of the current DualQuaternionPose
- Returns
- the inverse
Definition at line 31 of file DualQuaternionPose.cpp.
◆ operator*() [1/2]
| const DualQuaternionPose state_representation::DualQuaternionPose::operator* | ( | const DualQuaternionPose & | p | ) | const |
Overload the * operator.
- Parameters
-
p DualQuaternionState to multiply with
- Returns
- the current DualQuaternionState multiply by the DualQuaternionState given in argument
Definition at line 52 of file DualQuaternionPose.cpp.
◆ operator*() [2/2]
| const DualQuaternionPose state_representation::DualQuaternionPose::operator* | ( | const DualQuaternionState & | s | ) | const |
Overload the * operator.
- Parameters
-
p DualQuaternionState to multiply with
- Returns
- the current DualQuaternionState multiply by the DualQuaternionState given in argument
Definition at line 70 of file DualQuaternionPose.cpp.
◆ operator*=() [1/2]
| DualQuaternionPose & state_representation::DualQuaternionPose::operator*= | ( | const DualQuaternionPose & | q | ) |
Overload the *= operator.
- Parameters
-
q DualQuaternion to multiply with
- Returns
- the current DualQuaternion multiply by the DualQuaternion given in argument
Definition at line 41 of file DualQuaternionPose.cpp.
◆ operator*=() [2/2]
| DualQuaternionPose & state_representation::DualQuaternionPose::operator*= | ( | const DualQuaternionState & | s | ) |
Overload the *= operator.
- Parameters
-
q DualQuaternion to multiply with
- Returns
- the current DualQuaternion multiply by the DualQuaternion given in argument
Definition at line 58 of file DualQuaternionPose.cpp.
◆ operator=()
| void state_representation::DualQuaternionPose::operator= | ( | const DualQuaternionState & | s | ) |
Overload the = operator with a DualQuaternionState.
- Parameters
-
s DualQuaternion to copy values from
Definition at line 76 of file DualQuaternionPose.cpp.
◆ set_orientation()
|
inline |
Setter of the orientation.
Definition at line 146 of file DualQuaternionPose.hpp.
◆ set_position() [1/2]
|
inline |
Setter of the position from a dual.
Definition at line 170 of file DualQuaternionPose.hpp.
◆ set_position() [2/2]
|
inline |
Setter of the psotion from a vector.
Definition at line 162 of file DualQuaternionPose.hpp.
Friends And Related Function Documentation
◆ log
|
friend |
Calculate the log of a dual quaternion.
- Parameters
-
state the dual quaternion to calcualte the log on
- Returns
- the log of the dual quaternion
Definition at line 94 of file DualQuaternionPose.cpp.
◆ operator<<
|
friend |
Overload the ostream operator for printing.
- Parameters
-
os the ostream to happend the string representing the state to state the state to print
- Returns
- the appended ostream
Definition at line 104 of file DualQuaternionPose.cpp.
The documentation for this class was generated from the following files:
- /github/workspace/source/state_representation/include/state_representation/space/dual_quaternion/DualQuaternionPose.hpp
- /github/workspace/source/state_representation/src/space/dual_quaternion/DualQuaternionPose.cpp